相机位姿, C2W, W2C
Camera pose
我们常说相机位姿用来相机的镜头朝向$R$+相机在世界坐标系空间位置$t$, 但是这个说法其实是有问题的,初学时容易陷入误区: “既然需要的是相机镜头的方向,为什么不使用三维的空间向量来表示,而是要使用四维的四元数” 这其实是表述时候引起的误解。所谓”相机镜头的方向”其实是不对的, 其实还隐含着相机的头顶朝向, 想象一下, 相机绕着镜头的中轴线旋转时, 此时镜头的方向都是相同的, 但是拍摄出的画面是完全不同的。
所以, 到底什么是相机的位姿?
首先, 位姿都是相对的概念, 必须有一个参考系我们才能谈论相机的位姿, “相机位姿(camera pose)”其实是一个省略的说法, 全程应该是”相机在世界坐标系中的位姿”。我们所处的世界空间就是我们常常默认而忽略的参考坐标系。
| 相机位姿的常见表示有$qvec+tvec$, 或者4×4的齐次$[R | t]$矩阵。下文中: $R$代表相机位姿的旋转矩阵, $t$代表相机相对于世界坐标系原点的位移向量, $T$代表4×4的变换矩阵$[R | t]$。 |
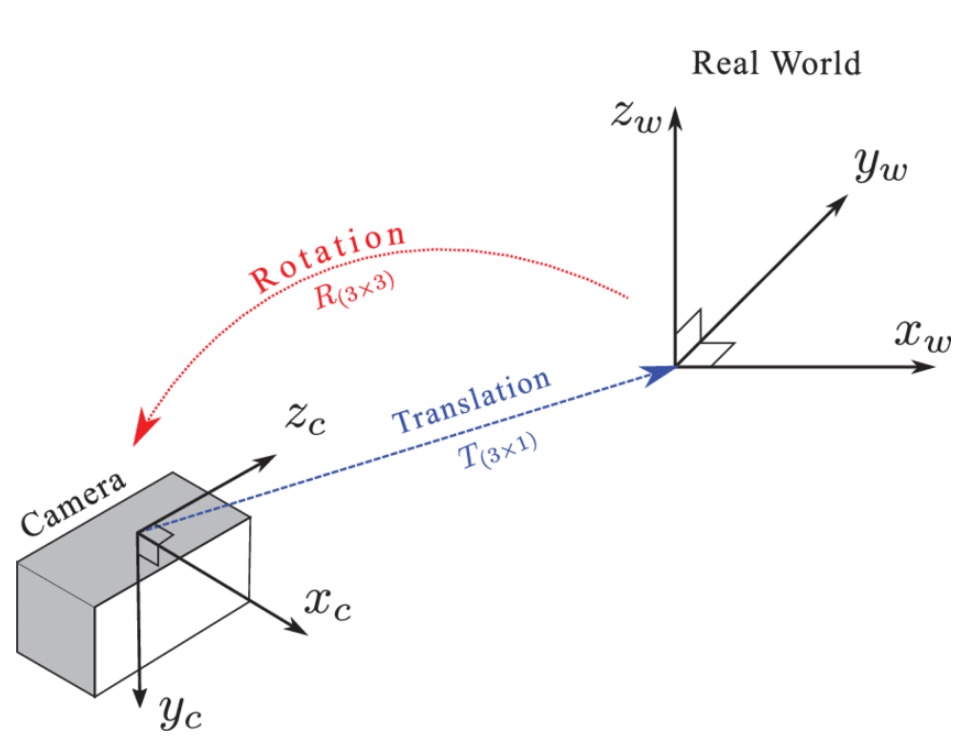
Q: 相机的位姿由旋转和位移组成,位移是相机在世界坐标系下的位置,旋转$R$又能代表什么?有什么物理含义?
相机位姿与”W2C, C2W”的关系
C2W
C2W(Camera to World)就是将一个向量从相机坐标系变换到世界坐标系。
位移为相机在世界坐标系的坐标, 旋转为相机位姿的旋转矩阵的转置$R^T$
所以为什么需要多一个转置?旋转矩阵的转置与定义
W2C
通常的计算方法是计算得到C2W的Rt矩阵之后, 直接求逆
1
T_{W2C} = np.linalg.inv(Rt)
相机位姿中旋转矩阵的转置与定义
相机的旋转矩阵$R$通常表示:世界坐标系到相机坐标系的旋转
为什么这么定义?
\[Rt = \begin{bmatrix} R^T & t \\ 0 & 1 \end{bmatrix}\]C2W变换矩阵中的位移向量是“相机在世界坐标系中的位置”
\[C2W = \begin{pmatrix} R & t \\ 0 & 1 \end{pmatrix}\]假设我们有一个世界坐标系中的点$P_W$, 那么在相机坐标系中的位置$P_C$:
\[P_C = RP_W + t\] \[P_W = R^{-1}P_C-R^{-1}t\]在左乘右乘之前: 列向量or行向量
在聊天中发现,大家有时候会混淆行/列向量导致说的计算过程牛唇不对马嘴。
首先,$P_W, P_C$都是(4, 1)的列向量。
\[P_W=T_{C2W}P_C\] \[P_C= \begin{pmatrix} x_C \\ y_C \\ z_C \\ 1 \end{pmatrix}\] \[P_W= \begin{pmatrix} x_W \\ y_W \\ z_W \\ 1 \end{pmatrix}\] \[P_W=\begin{pmatrix} R · \begin{pmatrix} x_C \\ y_C \\ z_C \\ \end{pmatrix} + t\\ 1 \end{pmatrix}\]W2C
Tracking 与 SLAM
| Tracking得到的是$W \rightarrow C$的变换, 但是因为物体坐标系与世界坐标系常常被默认为重合, 因此$obj \rightarrow W$被视为$[I | 0]$, |
SLAM
\[obj \rightarrow world \leftarrow camera \\ \downarrow \\ obj \rightarrow camera = T^{-1}_{c2w}T_{o2w}\]举例
##
model输出的camera pose保存到pred.csv中 与gt.csv比较
当保存res_fine[‘cam2w’]
保存时计算其逆矩阵
保存[‘w2cam]到csv中
然后在可视化中:
R = R.T t = -R.T @ t
这样可以正确对齐
对cam2w的y轴取反
相机位姿, 物体位姿 与 可视化
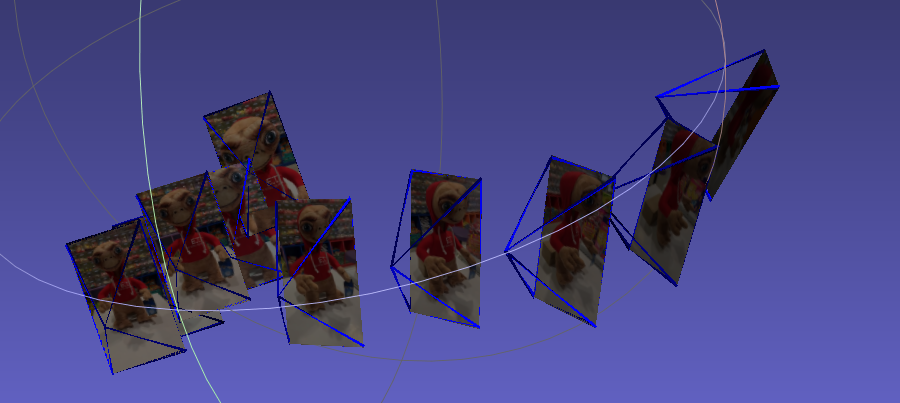
分析了这么多, 如果我现在有一个camera pose(通过colmap或其他手段标定得到的), 我现在想在三维空间中绘制一个视椎体, 可视化这个camera pose, 我应该怎么做?
https://www.kaggle.com/competitions/image-matching-challenge-2025/discussion/573183
稍后回来