工具坐标系(TCF)标定
目标:标定pika与机械臂末端架爪坐标系
因为架爪与机械臂末端之间的定制连接件的孔位不是严格对齐的,因此使用六点标定(偏移和旋转量),架爪TCP到末端的变换矩阵。
坐标系
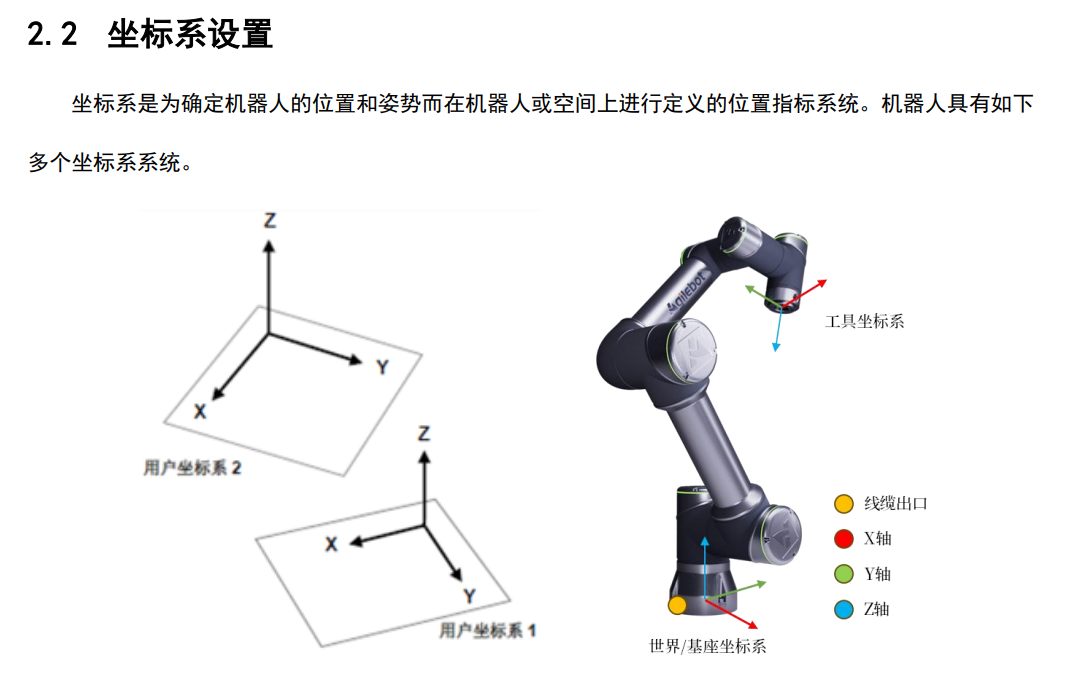
工具坐标系:这是用来定义工具中心点(TCP)的位置和工具姿势的坐标系。工具坐标系必须事先进行设定。未定义时,默认是末端法兰坐标系。
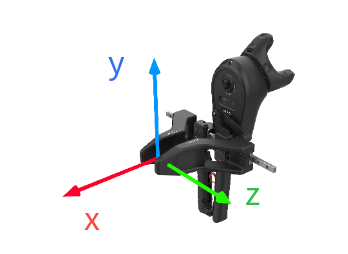
需要确定
pika sense坐标系的中心点位置。
标定针标定后的结果是针尖,因此需要测量后减去。
参考
在工具上确定的一个参考点(最好是工具中心点Tool Center Point, TCP),作为机器人动作范围内的参考点。
本文由作者按照 CC BY 4.0 进行授权