pika calib
##
数据采集
硬件
基站亮绿灯
确保顶部HTC vive的传感器已经启动(亮绿灯)
程序
- 标定(清空之前的结果,否则去掉–force-calibrate)
1
cd ~/workspace/pika_ros/install/libsurvive/bin && ./survive-cli --force-calibrate
- 启动sensor
1
2
cd ~/workspace/pika_ros/scripts
bash start_multi_sensor.bash
start_multi_sensor.bash中可以修改相机帧率(参考realsense-viewer中已有的帧率配置)
- 启动记录程序
1
ros2 launch data_tools run_data_capture.launch.py useService:=true type:=multi_pika datasetDir:=$HOME/agilex/data episodeIndex:=0
episodeIndex:=0为从0开始记录,如果有已有数据建议清空或修改该编号
- 数据对齐和处理(pika)
1
conda activate pika && cd ~/workspace/pika_ros/scripts && python3 data_sync.py --type multi_pika --datasetDir $HOME/agilex/data/ # 双夹持器
同步后,每个相机的路径下会有一个sync.txt文件
生成点云(可选)
1
conda activate pika && cd ~/workspace/pika_ros/scripts && python3 camera_point_cloud_filter.py --type multi_pika --datasetDir $HOME/agilex/data/ # 双夹持器
转换hdf5
1
conda activate pika && cd ~/workspace/pika_ros/scripts && python3 data_to_hdf5.py --type multi_pika --datasetDir $HOME/agilex/data/ # 双夹持器
7.转换数据为lerobot格式
两种方案:
手动处理数据
1
2
3
4
PIKA_DATA=/home/xxx/agilex/data
cd /home/xxx/workspace/VLA/openpi
source .venv/bin/activate
python examples/libero/pika_cut_gradio.py
不处理数据直接转换
1
2
3
4
PIKA_DATA=/home/xxx/agilex/data
cd /home/xxx/workspace/VLA/openpi
source .venv/bin/activate
cd /home/xxx/workspace/VLA/openpi/examples/libero && python convert_pika_data_to_lerobot.py --data_dir $PIKA_DATA
服务器
上传lerobot数据到服务器
修改repo
1
vim /app/.venv/lib/python3.11/site-packages/openpi/training/config.py
计算norm_stat
1
python scripts/compute_norm_stats.py --config-name pi05_pika
训练
1
XLA_PYTHON_CLIENT_MEM_FRACTION=0.9 python scripts/train.py pi05_pika --exp-name=cillion_test --overwrite
关于数据方案
umi数据与遥操数据,
umi数据的好处是采集灵活,效率高。但是其缺乏了机械臂的内部参数,如关节角度,关节速度等只能依靠来获得
数据转换
openpi的示例libero数据转换使用的是来自OpenVLA附录中提到的处理后的4个数据集,他们是OpenVLA按照rlds的格式处理过的。
观察OpenVLA的相关处理:experiments/robot/libero/regenerate_libero_dataset.py、experiments/robot/libero/run_libero_eval.py、prismatic/vla/datasets/rlds/oxe/transforms.py 和 configs.py)
state 的维度:8
前 6 维:EEF_state(3 维位置 + 3 维 orientation 的 axis-angle / Euler 表示,共 6 维)。代码中有 obs[“robot0_eef_pos”] 和 quat2axisangle(obs[“robot0_eef_quat”]) 拼接成 6 维 ee_states。 最后 2 维:gripper_state(robot0_gripper_qpos,为 2 维 gripper qpos)。 证据:regenerate_libero_dataset.py 将 ee_states 保存为 6 维,并在 transforms.py 中把 trajectory[“observation”][“EEF_state”] = state[:, :6] 且 gripper_state = state[:, -2:](注释为 “2D gripper state”)。
action 的维度:7
前 6 维:与末端执行器(EEF)相关的运动维度(EEF_pos + EEF_orientation),通常以 3D 位置 + 3D 方向表示(仓库中用 position(3) + quat→axis-angle(3) 表示)。 第 7 维(最后一维):夹爪动作(gripper),标量(表示开/关,仓库中有多个位置对其进行归一化/翻转以匹配不同表示,例如在 transforms.py 中把 gripper clip 到 0..1 并翻转,环境期望的是 -1..+1)。 证据:get_libero_dummy_action 返回长度 7 的动作向量;transforms.py 把 action[:, :6] 与 gripper(action[:, -1:]) 分开处理并重新 concat。
pika数据转换
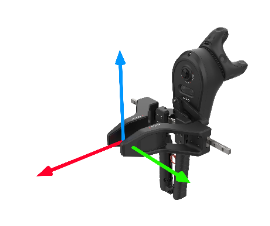
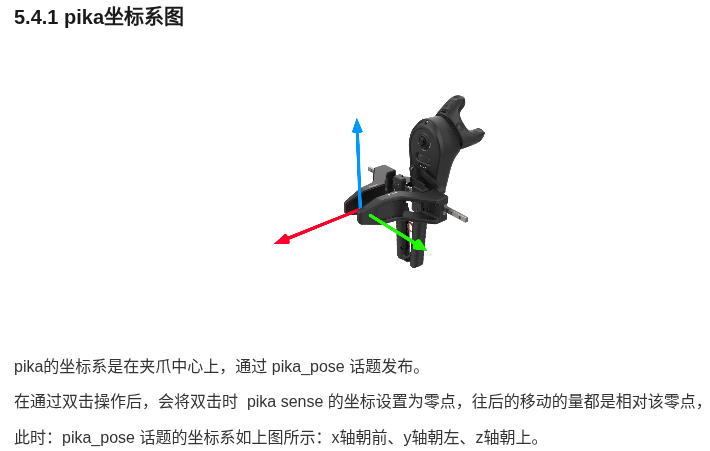
如图所示,x轴朝前,y轴朝左,z轴朝上
1
x, y, z, roll, pitch, yaw
roll, pitch, yaw对应x,y,z的旋转

常见组合 ZYX:
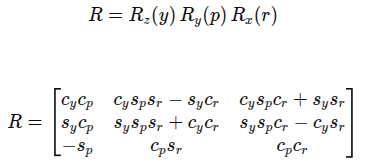
外旋ZYX或者内旋XYZ,哪种都能解释,最终结果是一样的
rot
\[T_{\text{base}}^{-1} T_{\text{end}} = \begin{bmatrix} R_{\text{base}} & t_{\text{base}} \\ 0 & 1 \end{bmatrix}^{-1} \begin{bmatrix} R_{\text{end}} & t_{\text{end}} \\ 0 & 1 \end{bmatrix}\] \[T_{\text{base}}^{-1} T_{\text{end}} = \left[ R_{\text{base}}^{\top}, - R_{\text{base}}^{\top} t_{\text{base}} \right] \left[ R_{\text{end}}, t_{\text{end}} \right] = \left[ R_{\text{base}}^{\top} R_{\text{end}},\; R_{\text{base}}^{\top} (t_{\text{end}} - t_{\text{base}}) \right].\]初步方案
state: [pos, rot, gripper_angle]
action: [$\Delta$pos, $\Delta$rot, $\Delta$gripper_angle]
state是输入给模型的观测,包括当前的相机观测,姿态等
action则是模型的预测gt,当前状态对应的未来n步动作,如delta末端姿态/delta关节角度/夹爪数值
虽然是这样, 但是在数据转换阶段, add_frame中只能存一时刻的state和action, 此时他们又分别是什么?
更远的事情
聊点其他的更遥远的事情。鱼眼相机虽然能够获得更多的视野(论文中有对比普通相机与鱼眼相机的效果), 但是其观察的视角与人类(操作者)的视角并不相同。
例如在操作插板子时(类似于插内存条的动作)负责插的夹爪的鱼眼相机观测视角是不够的,此时即便是人类也需要尝试不同的视角来观察。
虽然可以说,人类的的观察视角并不一定是最优的,但是就目前的进度而言,既然需要依赖人类操作者来采集数据,那么一个符合人类视角的观测是否是更为合理呢? 又或者,我们是否有方式可以直接越过这个阶段。
人类视角观察&人类视角操作 -> 人类视角观察&机器视角操作 -> 机器视角观察&机器视角操作
参考
https://github.com/Physical-Intelligence/openpi/issues/454
https://github.com/real-stanford/universal_manipulation_interface/issues/90
https://github.com/Physical-Intelligence/openpi/issues/637
https://umi-gripper.github.io/
https://umi-on-legs.github.io/
https://github.com/huggingface/lerobot/blob/6e86a69dcd049f76436a73b759ccacd94bc06a63/docs/source/lerobot-dataset-v3.mdx#L298
升级openpi的lerobot版本 https://github.com/Physical-Intelligence/openpi/issues/689#issuecomment-3475459732 https://github.com/Physical-Intelligence/openpi/issues/595#issuecomment-3240702737
可以看看
https://github.com/X-Square-Robot/wall-x/issues/26 wall-x使用绝对位姿输入模型
其他
部分步骤的正常输出
用于对比
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
~/workspace/pika_ros/install/libsurvive/bin$ ./survive-cli --force-calibrate
Info: Loaded drivers: GlobalSceneSolver, HTCVive
Info: Force calibrate flag set -- clearing position on all lighthouses
Info: Adding tracked object WM0 from HTC
Info: Device WM0 has watchman FW version 1592875850 and FPGA version 538/7/2; named ' watchman'. Hardware id 0x84020109 Board rev: 3 (len 56)
Info: Detected LH gen 2 system.
Info: LightcapMode (WM0) 1 -> 2 (ff)
Info: Adding lighthouse ch 6 (idx: 0, cnt: 1)
Info: OOTX not set for LH in channel 6; attaching ootx decoder using device WM0
Info: Adding lighthouse ch 1 (idx: 1, cnt: 2)
Info: OOTX not set for LH in channel 1; attaching ootx decoder using device WM0
Info: Adding tracked object WM1 from HTC
Info: Device WM1 has watchman FW version 1592875850 and FPGA version 538/7/2; named ' watchman'. Hardware id 0x84020109 Board rev: 3 (len 56)
Info: LightcapMode (WM1) 1 -> 2 (ff)
Info: (6) Preamble found
Info: (1) Preamble found
Info: (6) Preamble found
Info: (1) Preamble found
Info: Got OOTX packet 6 06448fa4
Info: (1) Preamble found
Info: (1) Preamble found
Info: Got OOTX packet 1 12b2fa8d
Info: MPFIT success 2277272.183140/277.8561557031/0.0001491 (109 measurements, 4, MP_OK_DIR, 6 iters, up err 0.0008807, trace 0.0000188)
Info: Global solve with 3 scenes for 0 with error of 2277272.183140/277.8561557031 (acc err 0.0022)
Info: Global solve with 3 scenes for 1 with error of 2277272.183140/277.8561557031 (acc err 0.0001)
Info: Using LH 0 (06448fa4) as reference lighthouse
Info: MPFIT success 1659.855593/328.8134504763/0.0001460 (139 measurements, 1, MP_OK_CHI, 5 iters, up err 0.0007819, trace 0.0000318)
Info: Global solve with 4 scenes for 0 with error of 1659.855593/328.8134504763 (acc err 0.0023)
Info: Global solve with 4 scenes for 1 with error of 1659.855593/328.8134504763 (acc err 0.0001)
Info: Using LH 0 (06448fa4) as reference lighthouse
Info: MPFIT success 16759.440809/409.2843220775/0.0001468 (176 measurements, 1, MP_OK_CHI, 4 iters, up err 0.0006609, trace 0.0000272)
Info: Global solve with 5 scenes for 0 with error of 16759.440809/409.2843220775 (acc err 0.0023)
Info: Global solve with 5 scenes for 1 with error of 16759.440809/409.2843220775 (acc err 0.0001)
Info: Using LH 0 (06448fa4) as reference lighthouse
Info: MPFIT success 26845.861457/632.1183096072/0.0001677 (205 measurements, 1, MP_OK_CHI, 4 iters, up err 0.0004904, trace 0.0000340)
Info: Global solve with 6 scenes for 0 with error of 26845.861457/632.1183096072 (acc err 0.0019)
Info: Global solve with 6 scenes for 1 with error of 26845.861457/632.1183096072 (acc err 0.0001)
Info: Using LH 0 (06448fa4) as reference lighthouse
Info: MPFIT success 178658.136475/762.8943362070/0.0001695 (244 measurements, 1, MP_OK_CHI, 5 iters, up err 0.0004588, trace 0.0000348)
Info: Global solve with 7 scenes for 0 with error of 178658.136475/762.8943362070 (acc err 0.0020)
Info: Global solve with 7 scenes for 1 with error of 178658.136475/762.8943362070 (acc err 0.0001)
Info: Using LH 0 (06448fa4) as reference lighthouse
问题
Q:卡在没有Preamble found输出,说明频道1和6度基站没有被找到并添加。应该是无线接收器的问题?
1
2
3
4
5
6
7
8
9
Info: Adding tracked object WM0 from HTC
Info: Adding tracked object WM1 from HTC
Info: Device WM0 has watchman FW version 1592875850 and FPGA version 538/7/2; named ' watchman'. Hardware id 0x84020109 Board rev: 3 (len 56)
Info: Device WM1 has watchman FW version 1592875850 and FPGA version 538/7/2; named ' watchman'. Hardware id 0x84020109 Board rev: 3 (len 56)
Info: Detected LH gen 2 system.
Info: LightcapMode (WM1) 1 -> 2 (ff)
Info: LightcapMode (WM0) 1 -> 2 (ff)
Info: OOTX not set for LH in channel 6; attaching ootx decoder using device WM0
Info: OOTX not set for LH in channel 1; attaching ootx decoder using device WM0
A:将config.json 文件移除后再次进行校准
1
rm ~/.config/libsurvive/config.json
Q:如果rviz中丢了一个sensor, 只剩下一个sensor, 先等待一会,如果没有出现,使用setup_device.py重新设置
1
2
3
4
5
# 注意确定是鱼眼镜头(共三个镜头rs-rgb, rs-depth, fisheye)再按s,否则按q
cd ~/workspace/pika_ros/scripts/ && python3 setup_device.py
# 启动
cd ~/workspace/pika_ros/scripts && bash start_multi_sensor.bash
1
source ~/workspace/pika_ros/install/setup.sh
场景搭建
推荐基站距离操作中心约1.2m左右 2米向下俯视约15度
注意基站面朝方向不要有LED屛/玻璃等
采集数据时注意硬盘空间,多次采集之间人为地暂停一会,预留一段时间让计算机保存图像。
以及,如果启动sensor时报错No Space left, 检查
1
2
3
4
df -h df -i
cat /proc/sys/fs/inotify/max_user_watches
cat /proc/sys/fs/inotify/max_user_instances
# 65536 128
采集数据时将后台的vscode等关闭

日志
训练结束后, wandb目录下,找到与ckpt中wandb_id.txt中id为后缀的目录,下载到有网络环境中,使用
1
wandb sync <folder_path>
同步日志
关代理
1
2
3
4
5
6
unset http_proxy
unset https_proxy
unset all_proxy
unset HTTP_PROXY
unset HTTPS_PROXY
unset ALL_PROXY
上传数据集
1
rclone copy /home/eiir/.cache/huggingface/lerobot/winka9587/pick_cillion_v3 s3:mvrdd/public/VLA/datasets/custom/pick_cillion_v3 --progress --stats=10s --transfers=8 --checkers=16
训练结束
1
2
3
4
rclone copy s3:mvrdd/public/VLA/pretrained_weights/cillion_v2/10000 ./cillion_v2/10000 --progress --stats=10s --transfers=8 --checkers=16
rclone copy ./lerobot/pick_cillion_gbt/ s3:mvrdd/public/VLA/datasets/custom/pick_cillion_gbt --progress --stats=10s --transfers=8 --checkers=16
夹爪控制
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
# 1. setup
~/workspace/pika_ros/scripts$ python setup_device.py
# 2. 终端1: 启动
~/workspace/pika_ros/scripts$ bash start_multi_gripper.bash
# 3. 终端2: 监听
ros2 topic echo /gripper_l/data
ros2 topic echo /gripper_r/data
# 如果上电正常,默认enable是false,如果默认enable是true,可能是内部默认值,建议检查供电是否正常。
# header:
# stamp:
# sec: 1766560607
# nanosec: 168049360
# frame_id: ''
# angle: 0.017
# distance: 0.0006614444311719009
# effort: -329.0
# velocity: 0.0
# enable: false
# set_zero: false
# error: false
# voltage: 23.799999237060547
# driver_temp: 39.0
# motor_temp: 34.0
# bus_current: 0.0
# status: '0x40'
# 4. 终端3: 控制
# 以下以left gripper为例
# 失能,关闭对gripper的控制(失能和使能对时间戳无要求)
ros2 topic pub -r 10 /gripper_l/ctrl data_msgs/msg/Gripper "header:
stamp: {sec: 1766560595, nanosec: 0}
angle: 0.0
effort: 0.0
velocity: 0.0
enable: false"
# 使能,启动对gripper的控制(失能和使能对时间戳无要求)
ros2 topic pub -r 10 /gripper_l/ctrl data_msgs/msg/Gripper "header:
stamp: {sec: 1766560595, nanosec: 0}
angle: 0.0
effort: 0.0
velocity: 0.0
enable: true"
# 控制开关命令可以复制使能命令,但是注意时间戳复制topic echo相近的时间戳,不然无法控制
# 控制角度
ros2 topic pub -r 10 /gripper_l/ctrl data_msgs/msg/Gripper "header:
stamp: {sec: 1766560595, nanosec: 0}
angle: 0.0
effort: 0.0
velocity: 0.0
enable: true"
服务器训练步骤
1
2
export HF_HOME=/home/jovyan/workspace/.cache/
uv build之后服务器安装
1
2
3
4
5
6
7
8
9
10
11
uv pip install --no-index dist/openpi-0.1.0-py3-none-any.whl
# 修改为服务器路径
vim /app/.venv/lib/python3.11/site-packages/openpi/training/config.py
vim /app/.venv/lib/python3.11/site-packages/openpi/models/tokenizer.py
# 归一化
XLA_PYTHON_CLIENT_MEM_FRACTION=0.9 python scripts/compute_norm_stats.py --config-name=pi05_pika
# 启动训练
XLA_PYTHON_CLIENT_MEM_FRACTION=0.9 python scripts/train.py pi05_pika --exp-name=<exp_name> --overwrite --num-train-steps=15000
修改
尝试整合所有的cache文件到s3