spann3r论文阅读
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
Spann3R 主要数据流向:
┌──> 输入图像 I_t (当前帧)
│
├──> ViT 编码器 (Encoder_I) # 提取视觉特征
│ └──> 视觉特征 f_I^t
│
├──> 记忆查询特征 f_Q^{t-1} (上一帧查询)
│ └──> 进入 记忆读取 (Memory Read)
│
├──> 记忆模块 (Spatial Memory)
│ ├──> 记忆键 f_K (Memory Key)
│ ├──> 记忆值 f_V (Memory Value)
│ └──> 输出 融合特征 f_G^{t-1} (基于 f_Q^{t-1} 读取)
│
├──> 交织解码器 (Intertwined Decoders)
│ ├──> 目标解码器 (Target Decoder)
│ │ ├──> 输入: f_I^t (当前帧视觉特征), f_G^{t-1} (记忆读取结果)
│ │ ├──> 交叉注意力 处理两者
│ │ └──> 输出 查询特征 f_Q^t (用于下一帧)
│ │
│ ├──> 参考解码器 (Reference Decoder)
│ │ ├──> 输入: f_I^t, f_G^{t-1}
│ │ ├──> 交叉注意力 处理
│ │ ├──> 输出 点图 X_{t-1}, 置信度 C_{t-1}
│ │ ├──> 输出 记忆键 f_K^{t-1}
│ │ ├──> 输出 记忆值 f_V^{t-1} (编码自 X_{t-1})
│ │ └──> 更新 记忆模块
│
└──> 生成最终 3D 点云 (Pointmap X_t) 并用于下一帧
Encoder
$f^Q_{t-1}$是前一帧($t-1$时刻)通过Target Decoder生成的查询特征(参考公式4)。
这其实是一个loop, 用于重建场景的几何信息其实是隐式地存储在Decoder中的。
train
Q: spann3r可以接收有序/无序的数据作为输入, 那么在训练的时候, 是使用成对的数据训练还是整个连续序列进行训练?
A: 训练数据可以是成对的图像,也可以是整个序列,根据数据集和参数设置来改变。
数据集
下载进度
| 图标 | 说明 |
|---|---|
| :white_check_mark: | 基本完成 不排除有新增任务的可能 |
| :black_square_button: | 尚未完成 |
| :heavy_check_mark: | 可预见的未来 不需要进行任何修改 |
| :construction: | 近期(2周内)正在处理 |
| :warning: | 实现有待讨论 |
| dataset | size | download | preprocess | ready |
|---|---|---|---|---|
| Scannet++ | 1.5T | :heavy_check_mark: | :heavy_check_mark: | :heavy_check_mark: |
| Scannet | :heavy_check_mark: | :heavy_check_mark: | :heavy_check_mark: | |
| Habitat | :construction: | :construction: | :construction: | |
| ArkitScenes | :heavy_check_mark: | :heavy_check_mark: | :heavy_check_mark: | |
| Co3D | :construction: | :construction: | :construction: |
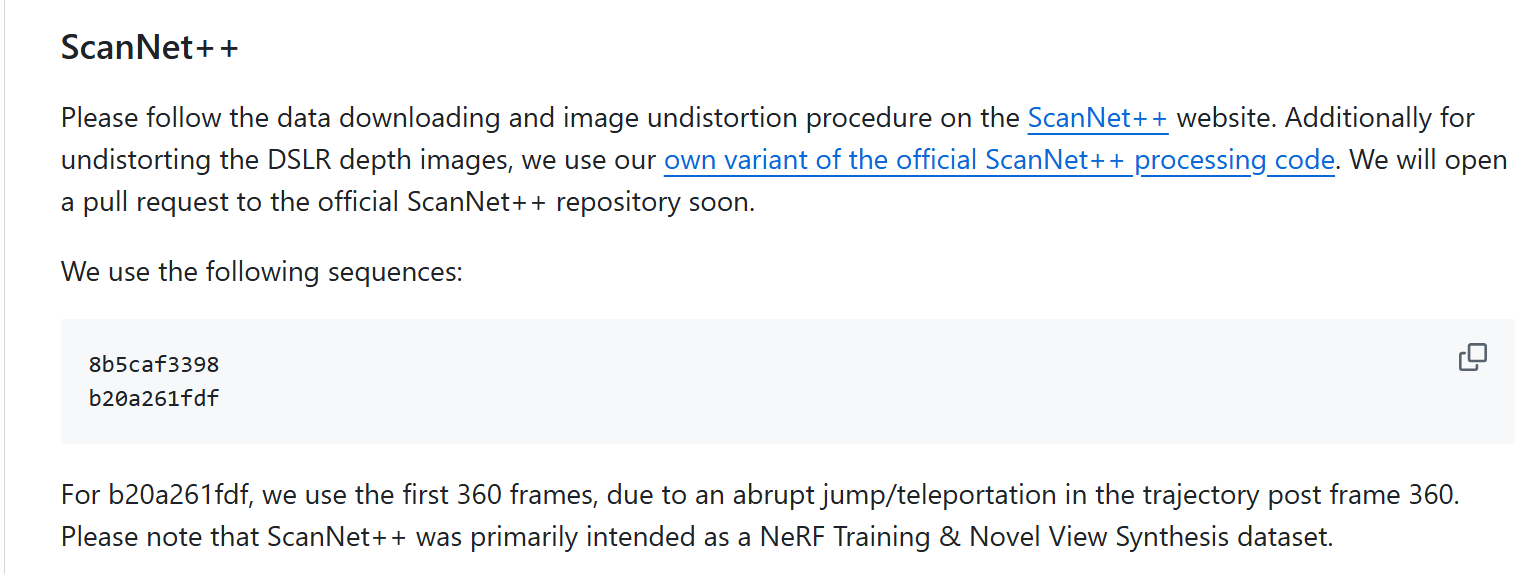
Scannet++
download
1
python download_scannetpp.py download_scannetpp.yml
下载过程中难免出现中断的情况, 下载完成后将download_scannetpp.yml中的dry_run修改为true可以检查缺失的文件并自动下载缺失文件。
download_scannetpp.yml中描述:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
###### specify the assets to download ######
# by default, these assets are downloaded for each scene:
# mesh+3D semantics, lowres dslr, iphone data
# see `scene_assets` and the dataset documentation page for more info on each asset
default_assets: [
# dslr lists, images
dslr_train_test_lists_path, dslr_resized_dir, dslr_resized_mask_dir,
# camera poses
dslr_colmap_dir, dslr_nerfstudio_transform_path,
# mesh
scan_mesh_path, scan_mesh_mask_path,
# annotation
scan_mesh_segs_path, scan_anno_json_path, scan_sem_mesh_path,
# iphone video and depth
iphone_video_path, iphone_video_mask_path, iphone_depth_path,
# camera poses
iphone_pose_intrinsic_imu_path, iphone_colmap_dir, iphone_exif_path
]
每个scene的结构:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
/dataset/ScanNetpp/data/00777c41d4$ tree -L 4
.
├── dslr # 单反相机
│ ├── colmap
│ │ ├── cameras.txt
│ │ ├── images.txt
│ │ └── points3D.txt
│ ├── nerfstudio
│ │ └── transforms.json
│ ├── resized_anon_masks
│ │ ├── DSC00850.png
│ │ ├── DSC00851.png
...
│ │ └── DSC01111.png
│ ├── resized_images
│ │ ├── DSC00850.JPG
│ │ ├── DSC00851.JPG
...
│ │ └── DSC01111.JPG
│ └── train_test_lists.json
├── iphone
│ ├── colmap
│ │ ├── cameras.txt
│ │ ├── images.txt
│ │ └── points3D.txt
│ ├── depth.bin
│ ├── exif.json
│ ├── pose_intrinsic_imu.json
│ ├── rgb_mask.mkv
│ └── rgb.mkv
└── scans
├── mesh_aligned_0.05_mask.txt
├── mesh_aligned_0.05.ply
├── mesh_aligned_0.05_semantic.ply
├── segments_anno.json
└── segments.json
预处理
spann3r仅使用DSLR数据(dust3r使用DSLR+iphone 参考https://github.com/HengyiWang/spann3r/issues/47)
generate undistorted DSLR depth.
先按scannetpp的预处理提取sens
然后按SplaTAM的处理提取
执行代码
1.Undistortion: convert fisheye images to pinhole with OpenCV
1
python -m dslr.undistort dslr/configs/undistort.yml
2.Render Depth for DSLR and iPhone
https://github.com/liu115/renderpy
安装依赖
1
2
3
4
git clone --recursive https://github.com/liu115/renderpy # clone with submodules
conda create -n renderpy python=3.9
conda activate renderpy
pip install .
编辑data_root路径
1
python -m common.render common/configs/render.yml
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
python -m common.render common/configs/render.yml
scene: 0%| | 0/2 [00:00<?, ?it/s]Init EGL
Detected 0 devices
scene: 0%| | 0/2 [00:00<?, ?it/s]
Traceback (most recent call last):
File "/data3/cxx/conda_envs/scanntpp/lib/python3.10/runpy.py", line 196, in _run_module_as_main
return _run_code(code, main_globals, None,
File "/data3/cxx/conda_envs/scanntpp/lib/python3.10/runpy.py", line 86, in _run_code
exec(code, run_globals)
File "/data5/cxx/dataset/SplaTAM_Nik-V9_scannetpp/common/render.py", line 89, in <module>
main(args)
File "/data5/cxx/dataset/SplaTAM_Nik-V9_scannetpp/common/render.py", line 47, in main
render_engine = renderpy.Render()
RuntimeError: Failed to initialize EGL
- 没有运行Undistortion: convert fisheye images to pinhole with COLMAP
官方仓库标记该预处理已经被废弃,可能是因为数据集中已经包含了结果。参考dslr/colmap下已经有了对应的colmap数据。
生成深度图
在执行下面代码前的结构是
1
2
data/7b6477cb95/dslr$ ls
colmap nerfstudio resized_anon_masks resized_images train_test_lists.json undistorted_anon_masks undistorted_images
https://github.com/Nik-V9/scannetpp?tab=readme-ov-file#render-depth-for-dslr-and-iphone
渲染深度图
1
python -m common.render common/configs/render.yml
生成dslr深度图
1
python -m common.render dslr/configs/undistort.yml
iphone预处理
这部分使用的是官方toolbox仓库的代码, 因为后来的Scannet++v2版本中将iphone数据的mp4格式修改为了mkv格式, Nik-V9的仓库中没有更新。
复制一份iphone/configs/prepare_iphone_data.yml模版, 修改data_root路径。
1
2
python -m iphone.prepare_iphone_data iphone/configs/prepare_iphone_data.yml
Scannet
Scannetv2 structure
Pre-process
follow instruction in data_preprocess.md of spann3r
ScanNet -> Step2. Extract and organize the dataset using pre-process script in SimpleRecon
- install packages in env.yml of simplerecon
1
2
3
4
5
6
7
8
9
10
11
12
# simplerecon/data_scripts/scannet_wrangling_scripts/env.yml
name: scannet_extraction
dependencies:
- python=3.9.7
- numpy
- imageio
- pillow
- tqdm
- pip
- pip:
- opencv-python
- pypng
- Extracting data from .sens files
生成无失真的DSLR深度
set SCANNET_ROOT and OUTPUT_PATH.
OUTPUT_PATH can be the same directory as the ScanNet root directory SCANNET_ROOT.
1
2
3
4
5
# SCANNET_ROOT=/data4/cxx/dataset/ScanNet/ScanNet
# OUTPUT_PATH=/data4/cxx/dataset/ScanNet/ScanNet
SCANNET_ROOT=/PATH/TO/ScanNet
OUTPUT_PATH=/PATH/TO//ScanNet
cd simplerecon/data_scripts/scannet_wrangling_scripts/
extract all scans for test
1
2
3
4
5
6
7
8
python reader.py --scans_folder $SCANNET_ROOT/scans_test \
--output_path $OUTPUT_PATH/scans_test \
--scan_list_file splits/scannetv2_test.txt \
--num_workers 12 \
--export_poses \
--export_depth_images \
--export_color_images \
--export_intrinsics;
extract all scans for train & val
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
python reader.py --scans_folder $SCANNET_ROOT/scans \
--output_path $OUTPUT_PATH/scans \
--scan_list_file splits/scannetv2_train.txt \
--num_workers 12 \
--export_poses \
--export_depth_images \
--export_color_images \
--export_intrinsics;
python reader.py --scans_folder $SCANNET_ROOT/scans \
--output_path $OUTPUT_PATH/scans \
--scan_list_file splits/scannetv2_val.txt \
--num_workers 12 \
--export_poses \
--export_depth_images \
--export_color_images \
--export_intrinsics;
最终处理后的结构为:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
SCANNET_ROOT(will be mentioned as /PATH/TO/ScanNet)
scans_test (test scans)
scene0707
scene0707_00_vh_clean_2.ply (gt mesh)
sensor_data
frame-000261.pose.txt
frame-000261.color.jpg
frame-000261.color.512.png (optional, image at 512x384)
frame-000261.color.640.png (optional, image at 640x480)
frame-000261.depth.png (full res depth, stored scale *1000)
frame-000261.depth.256.png (optional, depth at 256x192 also scaled)
scene0707.txt (scan metadata and image sizes)
intrinsic
intrinsic_depth.txt
intrinsic_color.txt
...
scans (val and train scans)
scene0000_00
(see above)
scene0000_01
....
habitat
habitat中合成训练数据, 使用0.1的最小重叠率作为超参数,渲染5帧训练序列。作者认为这可能会引入偏差,导致模型在重建Habitat-sim等合成数据集(例如Habitat-sim中的Replica数据集,未将其纳入训练)时表现不佳
根据issue44, Habitat 的训练数据是否仅包含 path.py 中两个未注释的场景(Gibson 和habitat-test-scene,如果目标只是复现结果,不需要HM3D数据集。
ARKitScenes
ARKitScenes数据集包含3个数据集: 3dod, upsampling, raw
根据官方描述:
3dod - 用于训练三维物体检测的数据集。该数据集包含3类资源:低分辨率RGB图像、低分辨率深度图像及标注文件(5047次threedod扫描总容量为623.4GB)
upsampling - 用于训练深度图上采样的数据集。包含3类资源:高分辨率RGB图像、低分辨率深度图像及高分辨率深度图像
raw - 包含ARKitScenes所有原始数据的全集,其中3dod和深度上采样数据集均为其子集。该数据集还包含大量未用于3DOD或深度上采样的其他资源
3dod/threedod
python download_data.py 3dod –video_id_csv threedod/3dod_train_val_splits.csv –download_dir ./data/raw_ARKitScenes
depth_upsampling
python download_data.py upsampling –video_id_csv depth_upsampling/upsampling_train_val_splits.csv –download_dir ./data/raw_ARKitScenes
raw
raw数据集有些特殊, 可以指定分辨率版本(这里只使用lowres)
python3 download_data.py raw –video_id_csv raw/raw_train_val_splits.csv –download_dir /tmp/ar_raw_all/ –raw_dataset_assets mov annotation mesh confidence highres_depth lowres_depth lowres_wide.traj lowres_wide lowres_wide_intrinsics
运行命令:
1
(/data3/cxx/conda_envs/spann3r) cxx@king:/data3/cxx/workspace/siggraph/spann3r/data/ARKitScenes/ARKitScenes$ python3 download_data.py raw --video_id_csv raw/raw_train_val_splits.csv --download_dir ./data/ar_raw_all/ --raw_dataset_assets mov annotation mesh confidence highres_depth lowres_depth lowres_wide.traj lowres_wide lowres_wide_intrinsics
1
2
cd /PATH/spann3r/data/ARKitScenes/ARKitScenes
python3 download_data.py raw --video_id_csv raw/raw_train_val_splits.csv --download_dir ./data/ar_raw_all/ --raw_dataset_assets mov annotation mesh confidence highres_depth lowres_depth lowres_wide.traj lowres_wide lowres_wide_intrinsics
Co3D
1
2
3
cd /PATH/TO/co3d_repo # github repo位置
# debug /data5/cxx/dataset/co3d/co3d_repo
python ./co3d/download_dataset.py --download_folder /data5/cxx/dataset/co3d/data
gpu limit
参考论文4.4节
作者反复提到, 由于gpu的内存限制(32G显存),训练使用5帧序列,限制了Spann3R能够处理的空间区域的大小。
build_dataset
1
2
3
4
5
6
7
8
9
10
11
12
def build_dataset(dataset, batch_size, num_workers, test=False):
split = ['Train', 'Test'][test]
print(f'Building {split} Data loader for dataset: ', dataset)
loader = get_data_loader(dataset,
batch_size=batch_size,
num_workers=num_workers,
pin_mem=True,
shuffle=not (test),
drop_last=not (test))
print(f"{split} dataset length: ", len(loader))
return loader
以以下输入为例
1
2
"--batch_size", "4",
"--train_dataset", "10000 @ Scannet(split='train', ROOT='/dataset/ScanNet', resolution=224, transform=ColorJitter, max_thresh=50)",
例如
1
train_dataset = "10000 @ Co3d(...) + 10000 @ BlendMVS(...)"
这里表示将两个数据集分别调整为 10000 个样本后,再将它们组合到一起。
具体代码在dust3r/datasets/base/easy_dataset.py中。
完整的训练数据集, 包含所有的样本, 经过10000 @ Scatnet采样后, 数量为10000
1
2
$ len(data_loader_train.dataset)
10000
当batch_size为4时,
1
2
$ len(data_loader_train)
2500