工具坐标系(TCF)标定
目标:标定pika与机械臂末端架爪坐标系 因为架爪与机械臂末端之间的定制连接件的孔位不是严格对齐的,因此使用六点标定(偏移和旋转量),架爪TCP到末端的变换矩阵。 坐标系 pika坐标系: pika的坐标系是在夹爪中心上,x轴朝前、y轴朝左、z轴朝右。 Agilebot坐标系 工具坐标系:这是用来定义工具中心点(TCP)的位置和工具姿势的坐标系。工具...
目标:标定pika与机械臂末端架爪坐标系 因为架爪与机械臂末端之间的定制连接件的孔位不是严格对齐的,因此使用六点标定(偏移和旋转量),架爪TCP到末端的变换矩阵。 坐标系 pika坐标系: pika的坐标系是在夹爪中心上,x轴朝前、y轴朝左、z轴朝右。 Agilebot坐标系 工具坐标系:这是用来定义工具中心点(TCP)的位置和工具姿势的坐标系。工具...
eval:开环与闭环 Single-instance Sim Benchmark Real Dataset
参考: Maximum Likelihood Training of Score-Based Diffusion Models(NeurIPS 2021) Flow Matching for Generative Modeling 基础概念 概率路径(probabilty path): 一个随着时间$t\in[0, 1]$变化的概率分布簇${p_t(x)}$ 连续正则化流(Cont...
概念定义 What is a Vision-Language-Action Model? VLM并不一定包含预训练的VLM, 满足VLA定义的关键在于: 能接受language + video输入 能够预测actions 但忽略了一点: 是否进行了基于视觉-语言数据的互联网规模预训练 如果没有internet-scale train, 作者认为属于 multimo...
关于VGGT中的AA
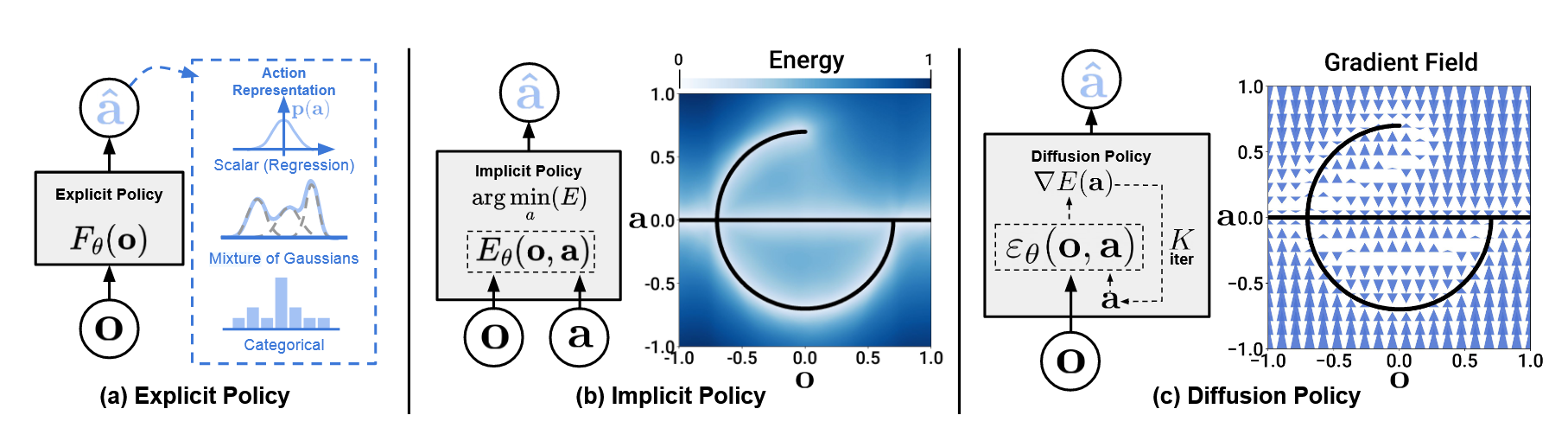
representing a robot’s visuomotor policy as a conditional denoising process. Diffusion Policy learns the gradient of the action-distribution score function and iteratively optimizes with respec...

https://www.kaggle.com/code/yosukeyama/rsna2025-32ch-img-infer-lb-0-69-share 举例: Found 176 DICOM files in series “176 个 DICOM” 通常表示同一个 Series 里有 176 个 instance,而一个 instance(SOPInstanceUID)通常就是一...
安装Google Cloud CLI(包含gsutil) 无法定位软件包 google-cloud-cli 确保有必要的依赖 sudo apt-get install -y apt-transport-https ca-certificates gnupg curl 删除旧的cloud.google的GPG key sudo rm -f /usr/share/keyrings/clo...

https://www.physicalintelligence.company/blog/pi0 Before start 梳理了一下VLA的发展历程,理论上应当从RT-1, RT-2, RT-X系列开始阅读,但是考虑到24和25年相关新工作的大量出现,尽快入门更加重要。目前的阅读思路是pi0, OpenVLA, RDT, pi0.5 About Generalist Robot P...