机器人夹爪相关
关于robotiq 2F-85的ROS/ROS2驱动相关: 官方论坛的讨论 官方停止维护的github repo panagelak个人开发的ROS2 driver
关于robotiq 2F-85的ROS/ROS2驱动相关: 官方论坛的讨论 官方停止维护的github repo panagelak个人开发的ROS2 driver
来自croco的Transformer Block, 类似于ViT或Swin Transformer的基本块。 class Block(nn.Module): def __init__(self, dim, num_heads, mlp_ratio=4., qkv_bias=False, drop=0., attn_drop=0., drop_p...
并不是为了学习VAE 而是之前看LRM的openreview意见时,有个review提到,LRM是一个判别模型而非生成模型。那么什么是判别模型(discriminative)什么又是生成模型(generative) 今天在ai summer里偶然看到了对比,临时记录下 图来自:https://theaisummer.com/latent-variable-models/
本文是对diffusion的入门级学习记录。 现在只考虑最简单的情况 学习资料来自: How diffusion models work: the math from scratch apxml GaussianObject: High-Quality 3D Object Reconstruction from Four Views with Gaussian Splatting ...
手撕MHA 我们需要什么 首先, 点积注意力(Scaled Dot-Product Attention)是注意力机制所需的最小单元,你也可以叫他(自注意力) 准备QKV 首先我们需要将输入的tensor映射到Query, Key和Value三个向量空间中去。 self.W_q = nn.Linear(embed_dim, embed_dim) self.W_k = nn.Linea...
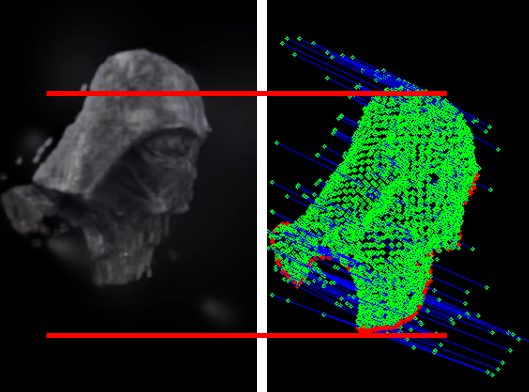
Spann3R 主要数据流向: ┌──> 输入图像 I_t (当前帧) │ ├──> ViT 编码器 (Encoder_I) # 提取视觉特征 │ └──> 视觉特征 f_I^t │ ├──> 记忆查询特征 f_Q^{t-1} (上一帧查询) │ └──> 进入 记忆读取 (Memory Read) │ ├──> 记忆模块 (Spati...
Related Work 分类 Branch Name From Input Output Hand-object 3D recon, object-agnostic HOSt3R arXiv 2025 two RGB image ...
MASt3R + 3dgs 关于colmap format保存数据的部分说明 相机内参保存3×3的$K$矩阵 相机外参保存 4×4的$E$矩阵(world-to-camera), 但是被拆分为$R$和$t$两部分保存, 其中$R$转换为四元数保存 MASt3R会对输入图像进行resize处理, 因此估计的内参和外参绑定的图像尺寸都是resize后的图像尺寸。因此在没有额外处理的情...

该攻击一共出现了3次, 最早一次是在23年5月份, 但是那次被托管中心的安全发现,发了警告并ban掉了整台服务器的IP访问。后面两次发生在24年1月31与2月5日,均没有被安全中心发现。 原因是因为早期服务器root权限管理混乱以及部分用户密码过弱导致。 2024.5 和该文中 https://blog.csdn.net/weixin_43693967/article/details/...
ERROR: Failed building wheel for diff-gaussian-rasterization python 3.10.14 nvcc 11.8 cmake 3.24.2 该错误最大的特征是几个编译中间文件报错No such file or directory ...submodules/diff-gaussian-rasterization/b...