# [论文阅读]NOCS:Normalized object coordinate space of category level 6D object pose and size estimation
# 在前面
这篇文章是CVPR 2019 oral,最关键就是提出了NOCS这个概念以及NOCS数据集,目前看到的类级别相关的检测和跟踪工作都是在这个数据集上跑的。因此了解NOCS的概念以及了解NOCS数据集的结构都是很重要的。
顺带一提,NOCS的数据集结构基本找不到什么说明,刚下载看的时候一头雾水。还好作者的两篇文章NOCS和CAPTRA公布了源码,对照源码里面的数据集处理能看个差不多。
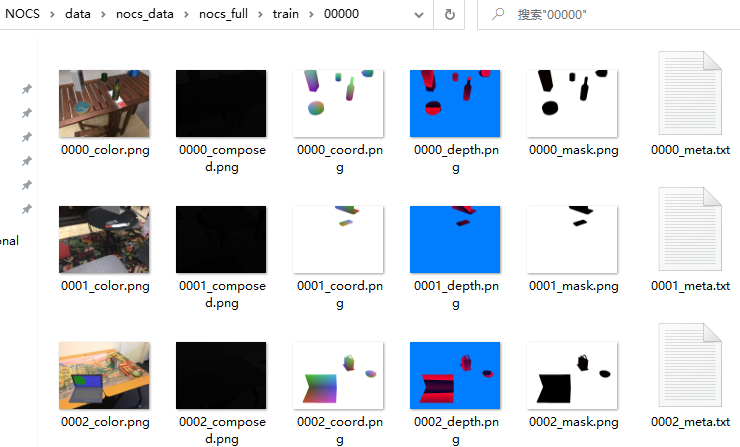 数据集大致结构
数据集大致结构
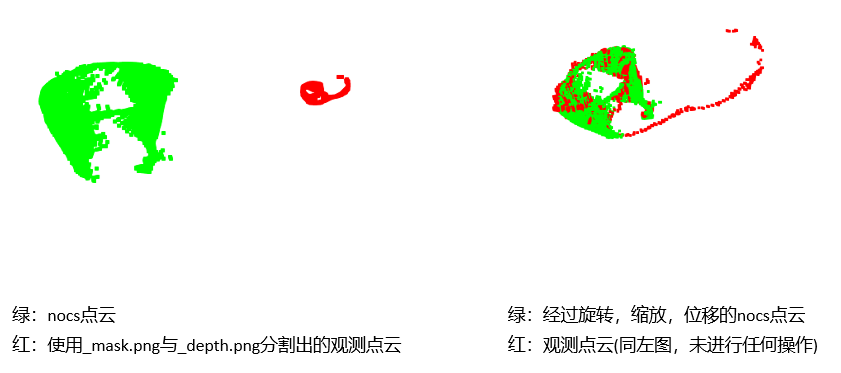
放点自己的跑的结果:
# 论文概要
目标:估计类级别(category level)对象的6D位姿和尺寸,类级别与实例级别(instance level)相对,类级别在训练和测试时没有对象的精确CAD模型
为了处理同一类别中不同的或者未见过的实例,引入归一化物体坐标空间(NOCS,Normalized Object Coordinated Space)对一个类中所有可能实例的共享规范化表示
使用基于区域的(region-based)神经网络,训练网络用来直接推断观察像素与NOCS以及其他信息(如类标签,instance mask)的对应关系。预测的结果能够结合深度图来联合估计杂乱场景中多个物体6D位姿和尺寸(dimension)
为了训练网络,提出了一种新的上下文感知技术来生成大量的标注混合现实数据。为了进一步改善模型并评估其在真实数据中的性能,也提供了真实数据集
现有的6D姿态估计方法
1.实例级别的6D姿态估计需要预知物体的精确的CAD模型和尺寸(size)
2.类级别的3D物体检测方法可以估计物体的类别标签和3D边界框,无需精确CAD模型,但是估计出的bbox依赖于视点(viewpoint-dependent),并且没有物体的朝向(orientation)
第一个问题是由于没有CAD模型,需要找到一种表示方式,能够定义同一类别不同物体6位姿和尺寸
第二个问题是在训练和测试时没有可用的大规模数据集
如何表示位姿?,将本文问题换个说法:找到物体像素和归一化坐标空间中的对应关系
定义归一化物体坐标空间NOCS,其中所有的对象都包含在一个公共规范化空间中,并且同一类别中所有实例物体的朝向都是一致的,这样就·能够6D位姿和尺寸的估计。
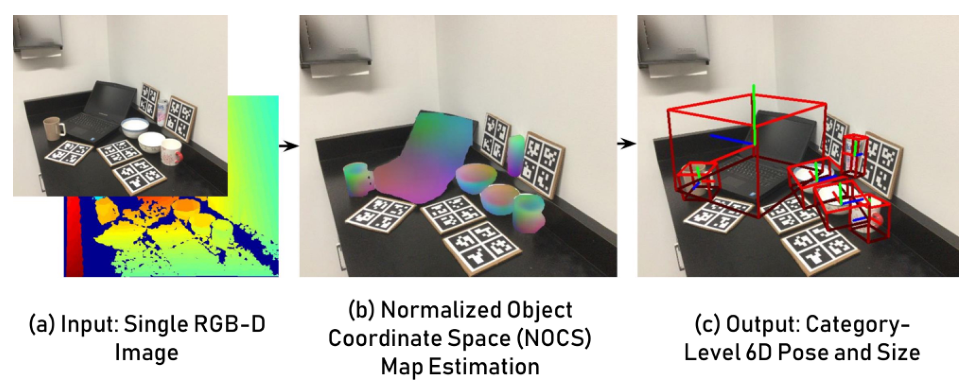
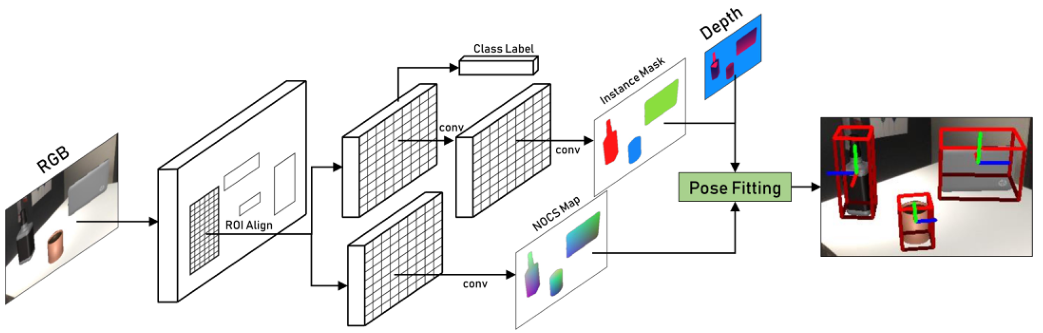
方法的核心是一个CNN,从单张RGB图像估计图像中多物体的类别、实例mask和NOCS map
直观地,NOCS map 通过预测物体像素和NOCS之间的密集对应(dense correspondence)来捕获物体的可见部分的标准化形状。CNN通过将其描述为像素回归或分类问题来估计NOCS图,然后使用位姿拟合,将NOCS图和深度图用来估计完整的6D位姿和尺寸。方法使用RGB-D输入,能够处理对称和非对称物体
为了解决训练数据问题,使用了一种混合现实方法,能够自动生成大量数据,这些数据是由ShapeNet中“逼真”(完全不)的合成图像和真实的桌面场景合成的。
该方法能生成具有多个对象的真实数据,以及类标签、实例mask、NOCS map、6D位姿、尺寸以及完整的ground truth注释。
除了合成数据集,还提供了一个真实世界的数据集,包含18个不同场景,6种物体类别,42个不同的实例。
现有的类级别位姿估计都局限于4DOF(例如汽车的位姿估计就是最常见的,因为车的形状都差不多)
1.首先这些算法都约束旋转仅限于重力方向,因此位姿仅4个自由度。
2.其次只关注部分room-scale物体(例如椅子,沙发,汽车),不考虑物体的对称性,本文关注hand-scale的物体(例如杯子,瓶子)。
3.本文还可以在不假设重力方向的情况下预测完整的6D位姿和大小
4.速度更快
# 什么是NOCS
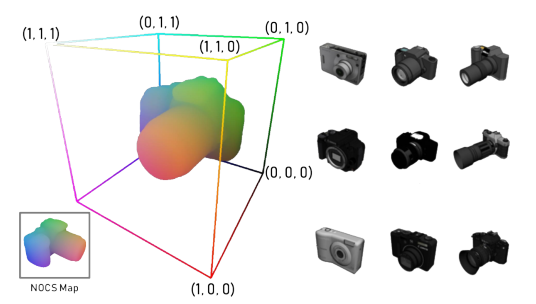
NOCS(Normalized Object Coordinate Space)是一个包含在单位立方体中的三维空间,对于给定的物体类别,使用规范化朝向的实例,并将其归一化到NOCS中。NOCS中每个点(x,y,z)都能可视化为RGB颜色元组。我们训练网络将NOCS投影到RGB图像上,即NOCS map(下图左下角)。在测试时,网络对NOCS图进行回归,然后与深度图一起用于6D位姿和尺寸的估计。
本文关注图像的3+3+3(旋转,位姿,尺寸),能够可视化为下图中的c
给定每个类别的的CAD模型集合,我们对物体进行一致的缩放,**将tight bbox的对角线缩放到1,并且在NOCS中居中,**以此来归一化物体的尺寸。
然后,对其同一类物体的中心和朝向,使用ShapeNetCore中的物体模型针对比例、位置和方向进行规范化。如下图为相机中一个物体的规范化示例
CNN预测彩色编码的NOCS坐标的2D****透视投影,即NOCS map
有许多方式来解释NOCS图:
(1)作为物体观察到的部分在NOCS中的形状重建
(2)作为密集的 像素-NOCS对应
在大型形状集合上训练时,我们的CNN学习对未见过的物体形状进行泛化,或者说,学习预测像素-NOCS的对应关系
NOCS这种表示方式比其他方式(例如bbox)更加鲁棒,因为即便物体仅部分可见时仍然可以进行操作
# 网络结构
使用RGB图和深度图作为输入,先看RGB
该CNN建立在Mask R-CNN框架的基础上,仅通过RGB图来估计类标签和instance mask以及NOCS map
在CNN中不使用深度图的原因是想要使用现有的RGB数据集(例如COCO这些没有深度信息的数据集)来提升性能。NOCS map 将物体的形状和size都encode到归一化空间,在稍后的阶段使用深度图(下图中的Depth)来提升这个归一化空间并使用鲁棒的异常值去除和对齐技术(如Umeyama算法)来预测完整的6D位姿和size
# 数据集相关
关于NOCS数据集的类标签,代码和数据集中是用下标来表示的。例如0代表bottle类。
['bottle', 'bowl', 'camera', 'can', 'laptop', 'mug']
下载链接
This links are all from captra
# current path relative to project root (captra): data/nocs_data/nocs_full
wget http://download.cs.stanford.edu/orion/nocs/camera_train.zip
unzip camera_train.zip
wget http://download.cs.stanford.edu/orion/nocs/camera_val25K.zip
unzip camera_val25K.zip
wget http://download.cs.stanford.edu/orion/nocs/real_train.zip
unzip real_train.zip
# evaluation
wget http://download.cs.stanford.edu/orion/nocs/real_test.zip
unzip real_test.zip
# obj_model
wget http://download.cs.stanford.edu/orion/nocs/obj_models.zip
unzip obj_models.zip
# Other
# Download and unzip nocs_model_corners.tar
# where the 3D bounding boxes of normalized object models are saved
wget http://download.cs.stanford.edu/orion/captra/nocs_model_corners.tar
tar -xzvf nocs_real_corners.tar
数据集的结构放到其他文章和代码一块提吧