# 为什么需要Feature
NOCS合成数据集中CAMERA的prior, 使用PCL计算出的法向(r=0.2)

https://pcl.readthedocs.io/projects/tutorials/en/master/how_features_work.html#how-3d-features-work
一个好的feature有什么条件:
1.刚性变换不会影响对特征的提取结果
2.对不同采样密度有相同结果
3.对噪声鲁棒
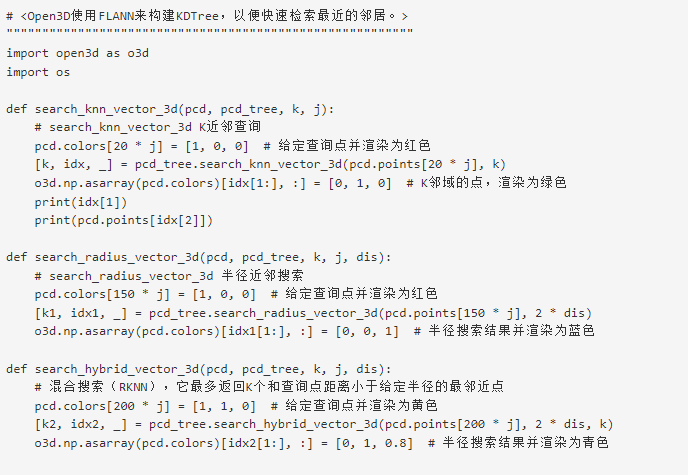
# PCL查询点的方法有两种:
1.k近邻(k-search)
2.半径r的球内包含的所有点(radius-search)
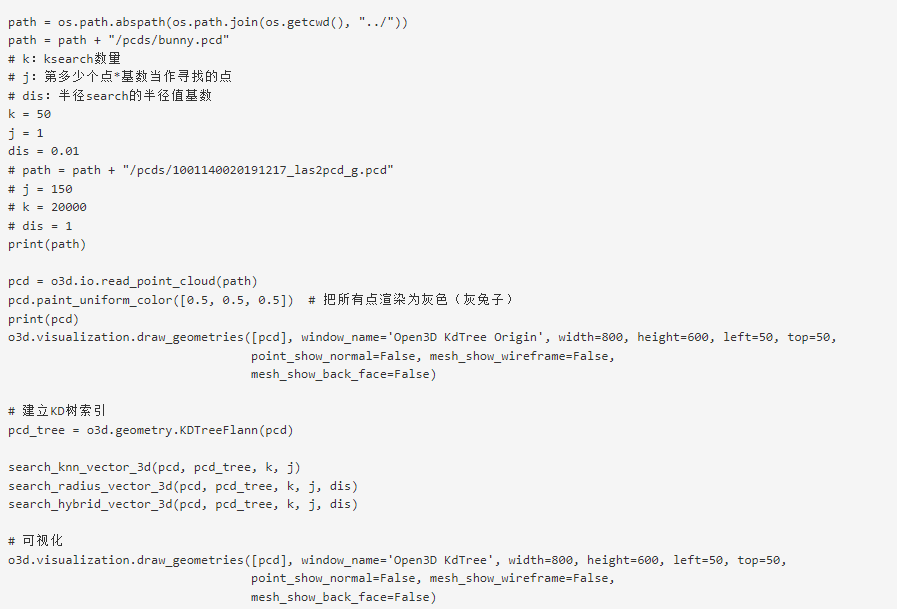
# open3d的三种搜索
https://www.pythonheidong.com/blog/article/545543/1020e69c61f15be61f77/
← SPD 关于curvature →